





8.1 Introduction
The Challenge
Roads are provided to cater for the movement of people and resources between destinations, i.e. to provide for mobility and access. Particularly in LMICs, roadside trading and social interaction continues to be an essential third function for parts of the road network. In these countries, the benefits of dedicating public spaces, where sociability rather than mobility is the priority, are being increasingly recognised. Mobility, accessibility, and commercial/social interaction are therefore the three key human uses that roads have to be designed and managed to serve.
Earlier chapters introduced the concepts of the Safe System and of safe travel as a product, which requires certain actions to produce it. Safe products must match the needs, capacities and expectations of their human users and roads are no exception. This chapter outlines how to create a road system that takes account of human characteristics.
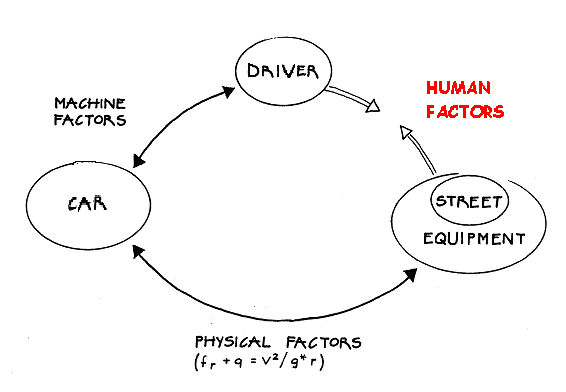
However, Human Factors cannot be considered independently from the other two components of the system, environment and vehicle.
Human Factors are a well-established scientific endeavour that has influenced developments in many areas of technology. Its application to road safety issues in a formal sense goes back to at least the 1930s (e.g. Forbes, 1939). Contemporary understanding of issues, such as the time it takes to perceive and detect any critical location that challenges the driver to adapt his driving programme and to make a new decision, the desired luminance, size and contrast between objects and the background needed to resolve detail, and the rate that information is absorbed, should underpin key standards in road design. Other important demands for road design arise from the holistic perception of the road user within the road environment. From there, essential design principles of ‘Gestalt’ have to be included in the technical design considerations (see Key Sources on Human Factors and Road Design later in this section). This understanding of the laws of human perception and activity regulation that includes the decision-making capacity of the road user allows for the development of design and operational specifications for the road system. This includes elements such as:
- Sight distance requirements.
- Lighting criteria.
- Design and dimensions of road signs.
- Spacing between successive decision points.
By effectively doing so, road users can navigate the road system safely and comfortably. Since knowledge in Human Factors continues to evolve, many of its findings remain to be absorbed in technical standards and guidelines of the road infrastructure profession. This chapter seeks to introduce the concept of Human Factors, relate it to Safe System principles, and explain how Human Factors can be applied to create a safer road system. Human Factors is the generic term for those psychological and physiological threshold limit values which are verified as contributing to operational mistakes in machine and vehicle handling. It deals with general and stable subconscious reactions of common road users and excludes temporary individual reactions and conditions. From there can be derived essential conclusions for basic design principles that are until now not well established in current national design guidelines (PIARC, 2012b).
In road safety, Human Factors are concerned with the interaction between human road users and the roadway system elements. The distinction is often made between unintended errors and disobedience of road rules. Unintended errors tend to occur when road users misperceive some aspect of the road system, they do not have enough time to react to changing situations, or they are confronted with unexpected situations. These issues and the means of remedying them are discussed in Section 8.2 Designing Infrastructure to Encourage Safe Behaviour.
Disobedience of the road rules often occurs when the road system does not adequately meet road users’ needs, e.g. when there are long waiting times to cross at signalised pedestrian crossings. However, disobedience of the road rules may also occur when users do not understand what they are supposed to do or understand the benefits of compliance. This is particularly the case in LMICs as they rapidly motorise and upgrade their road networks and sometimes may not have the signs, road markings or systems in place to guide and inform those driving, walking or cycling. Disobedience may also occur because some road users believe they can gain a benefit (such as a faster journey or a more convenient parking or unloading spot) without incurring any penalty. These issues and some of the implications they have for infrastructure provision are discussed in Section 8.3 Other Means of Encouraging Road Users to Behave According to the Rules.
Human Factors are not the same as we commonly understand human behaviour or human performance to be. So, the questions of personality traits like aggression, the will to violate traffic rules consciously or mistakes because of medication or age has to be regarded separately. From there can be derived essential conclusions for basic principles of driver's education, campaigns for influencing driving behaviour and enforcement. The AASHTO Highway Safety Manual (AASHTO, 2025) states that Human Factors issues include contributing factors to crashes that generally reflect mismatches between the demands placed on the road user by roadway design and traffic engineering features, and the inherent physical, perceptual, and cognitive capabilities and limitations of road users (Brown et al., 2022). Driver behaviour issues include contributing factors to crashes that generally reflect deliberate violations of law or safe driving practices such as texting while driving, inattention, or driving while impaired by alcohol. When ‘Human Factors’ and ‘driver behaviour’ issues are conflated by practitioners, more blame for the crash is placed on what is believed to be misbehaviour than on the interactions between road demands and driver capabilities. This approach can have the effect of leaving the real Human Factors issues (e.g. limited visibility, high workload, limited time to react) on their roadways unidentified and unaddressed. Information related to this concept are provided in the following sections:
- Design measures to create a self-explaining and failure-forgiving road according to the Human Factors needs of road users, are described in Section 8.2 Designing Infrastructure to Encourage Safe Behaviour.
- Measures relating to communication, education and enforcement including special warning signs and campaigns are described in Section 8.3 Other Means of Encouraging Road Users to Behave According to the Rules.
HUMAN FACTORS AND THE SAFE SYSTEM
Human Factors have a key role to play in achieving Safe System requirements.
Safe System principles require that no road users are killed or seriously injured. In an ideal system, collisions would not occur because the road is designed according to the needs of perception, cognitive processing and motor response for all the users. However, this is unlikely to be fully achieved as long as humans directly control vehicles and many roads are not designed in line with the needs of road users, such as in cases where speeds and road context call for the separation of road users. Even with the advent of autonomous and connected transportation, human control is still likely for some time into the future. In addition, there will be a transition period where some vehicles will have advanced technology, while others will not.
Efforts should therefore be made to help road users perceive the road correctly and to make decisions about driving, riding or walking that are safe for themselves and other road users. Applying the Human Factors principles described in the remainder of this section can contribute to achieving a collision-free road network, but it must be recognised that improving guidance will not always succeed in preventing collisions. That being the case, space to correct mistakes should be provided where possible, e.g. by having lane widths that allow some manoeuvre space, providing sealed shoulders, or by having stop lines some metres in advance of the walkway on pedestrian crossings so long as those changes do not adversely increase operating speeds. Adequate recovery space will reduce the number and severity of impacts; however, it will not always succeed in preventing impacts. Therefore, the Safe System requires forgiving infrastructure and forgiving vehicles so that when collisions do occur, they will not result in fatalities or non-recoverable injuries.
In summary, achieving Safe System requirements is possible if the combination of human, environmental and machine (vehicle) factors is addressed appropriately.
KEY SOURCES ON HUMAN FACTORS AND ROAD DESIGN
The NCHRP report ‘Human Factors Guidelines for Road Systems’ (HFGRS) (National Academies, 2012) is a comprehensive source on Human Factors and road system design and management concerning the reaction time needs of road users. It is intended to supplement the primary design references and standards, so that designers who do not have an extensive Human Factors background will be better able to take account of road user reaction time capabilities and limitations in the application of these standards. NCHRP has also published a report that considers human factors as part of countermeasure selection (National Academies, 2024). The document was developed to improve countermeasure selection by increasing the understanding the contributing factors leading to crashes, including human factors and behaviours.
PIARC has published a Human Factors document – Human Factors Principles of Spatial Perception for Safer Road Infrastructure (HFPSP) (PIARC, 2019). It is the most comprehensive approach to illustrate in a practical way the needs of road users for proper reaction time, for reliable guidance and stabilisation of user’s field of view and to pre-program user’s expectations so that mistakes can be avoided by design. It is based on the state of the art of human sciences, especially on the Gestalt principles of the Gestalt psychology.
When trying to make sense of the world, Gestalt psychology suggests that we tend to perceive things as a whole rather than as individual components as a way to more efficiently process information and make sense of our environment. Gestalt is the impression of content of perception that is clearly distinguishable from its background of scenery and the details of which are so integrated as to constitute a functional unit with properties not derived from the summation of its parts. It aligns well with Safe System principles and advocates a proactive approach to safety management, with the aim of designing roads so that crashes are unlikely. The HFPSP guide provides a powerful and convenient method for applying Human Factors principles to a wide range of situations that are likely to be encountered by drivers. It does not explicitly consider pedestrians or other vulnerable road users as active participants in the traffic system. However, the essential principles are also applicable to these road users, and the reader is encouraged to do so in cases where it is appropriate in their own practice.
The ‘Human factors guidelines for a safer man-road interface’ (PIARC, 2016b) presents the Human Factors concept which highlights how road characteristics influence a driver's right or wrong driving actions. The guideline explains the relationship between several road characteristics that trigger wrong perception and therefore also wrong driving reactions, most of which happen subconsciously. The guideline contains detailed examples and sketches to help practitioners gain an understanding of the relationship between misleading and irritating road characteristics and operational mistakes. Better understanding the Human Factors relationship to road safety allows for an ‘on-the-spot’ investigation of high-risk locations or single vehicle crashes or in road safety inspections (RSI). This information is also valuable in the planning and design processes in road safety audits (RSA). More details on RSI and RSA can be found in Section 10.4 Proactive Identification.
These documents provide powerful and convenient methods for applying human factors principles to a wide range of situations that are likely to be encountered by drivers. The following illustration outlines the damage and prevention-oriented crash approaches (Birth et al., 2004).
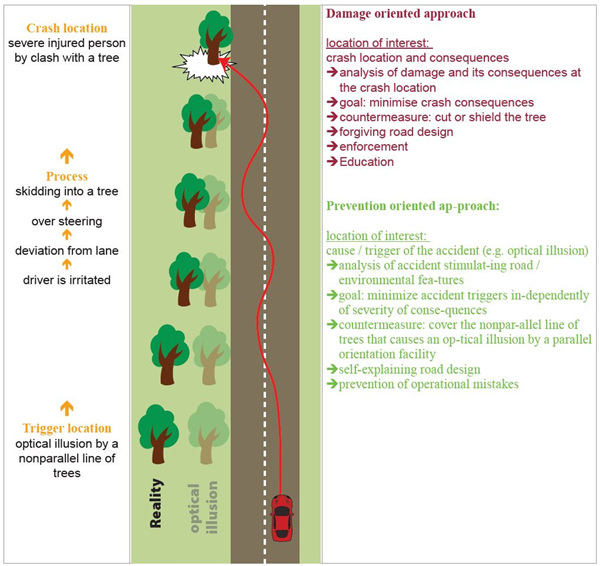
A road crash is generally the end-result of a multi-step process (Figure 8.3). By changing actions that are taken at any of these steps, a crash may or may not be avoided (Figure 8.4). Human factor specialists seek to understand the contribution of humans in road crashes in order to propose solutions that will break the chain leading to crashes. Analysis has to begin at the starting point (not just at the impact point) to better understand how these events occur.
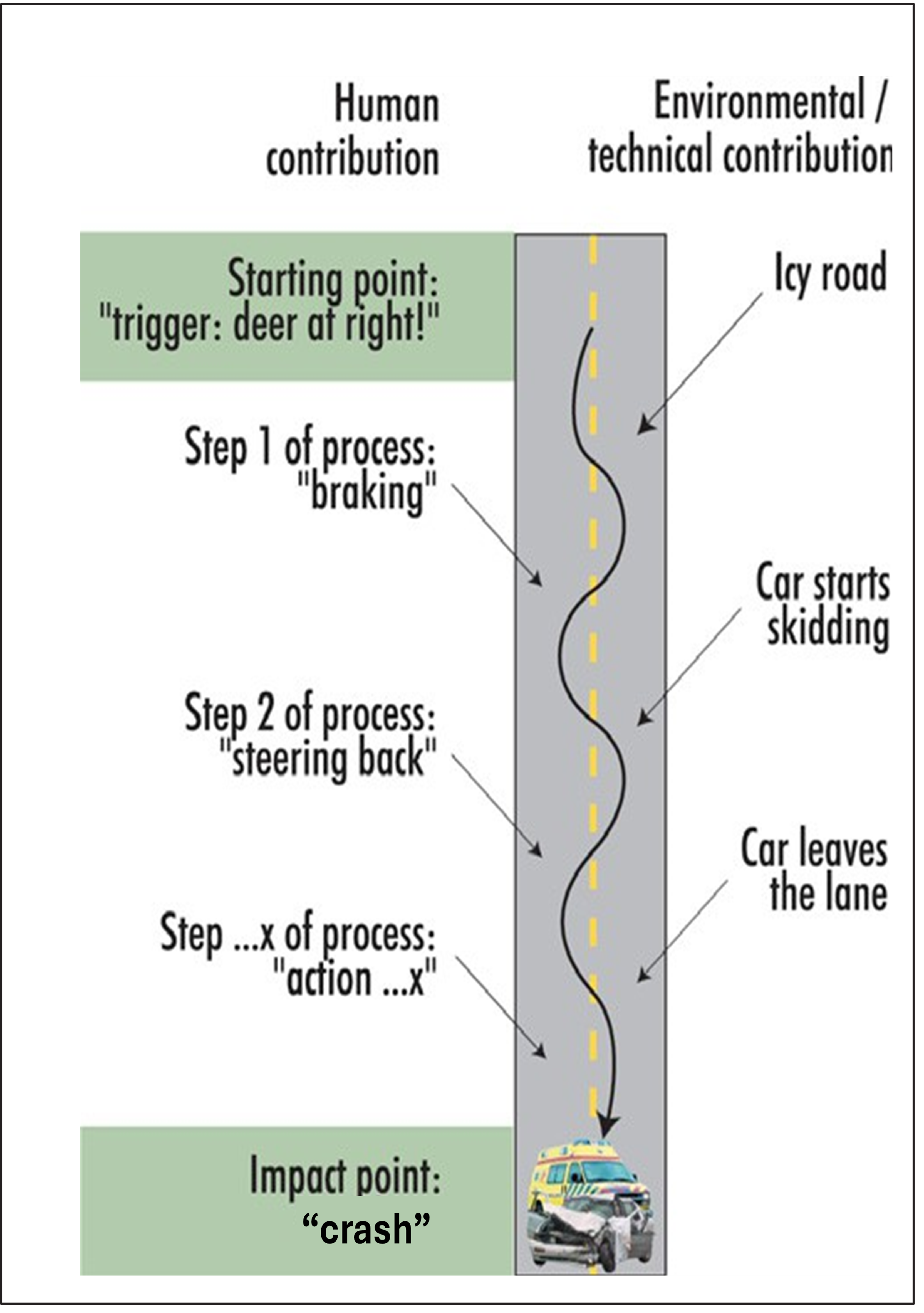 | 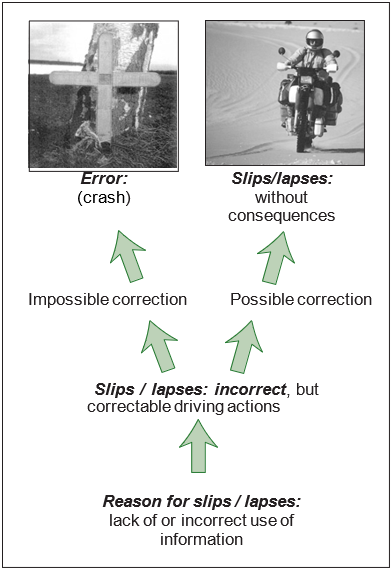 | |
| FIGURE 8.3: EXAMPLE – MULTI-STEP PROCESS LEADING TO A CRASH (SOURCE: SPORBECK ET AL, 2002) | FIGURE 8.4: EXAMPLE – TWO OUTCOMES FOR THE SAME SITUATION (SOURCE: VOLLPRACHT & BIRTH, 2002) |